

细粉加工设备(20-400目)
我公司自主研发的MTW欧版磨、LM立式磨等细粉加工设备,拥有多项国家专利,能够将石灰石、方解石、碳酸钙、重晶石、石膏、膨润土等物料研磨至20-400目,是您在电厂脱硫、煤粉制备、重钙加工等工业制粉领域的得力助手。






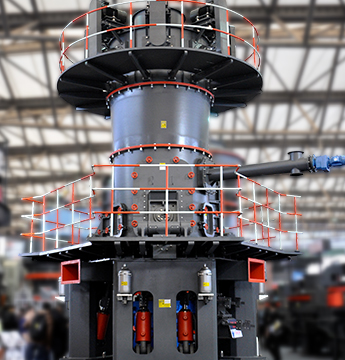
超细粉加工设备(400-3250目)
LUM超细立磨、MW环辊微粉磨吸收现代工业磨粉技术,专注于400-3250目范围内超细粉磨加工,细度可调可控,突破超细粉加工产能瓶颈,是超细粉加工领域粉磨装备的良好选择。

粗粉加工设备(0-3MM)
兼具磨粉机和破碎机性能优势,产量高、破碎比大、成品率高,在粗粉加工方面成绩斐然。

煤矸石机器


智能煤矸石分选机器人的研究与应用新煤网
2024年1月3日 智能煤矸石分选机器人是将待选的原煤通过原煤供给系统平铺到带式输送机上,使用图像分析和大数据智能识别技术对煤与矸石进行数字化识别,再通过高压气源 2023年3月8日 摘 要:依据我国煤矿智能绿色发展战略,深入分析了国内外智能拣矸系统的研究现状,指出研发适 用于井下的多机械臂煤矸石智能分拣机器人是破解煤矸分拣难题 多机械臂煤矸石智能分拣机器人关键共性技术研究

煤矸石智能分拣机器人研究进展与关键技术
2022年10月18日 指出煤矸石分拣工作环境复杂,其质量和形状不规则且呈随机分布,因此,复杂环境下煤矸石识别与抓取特征提取、非结构环境下煤矸石稳定可靠抓取、多目标 2022年11月5日 11 系统硬件设计 基于机器视觉的多机械臂煤矸石分拣机器人系统由煤矸石识别系统、机械臂、上位机、机器人控制器、视觉伺服系统等组成,如图1所示。 图1 基于机器视觉的多机械臂煤矸石分拣机 基于机器视觉的多机械臂煤矸石分拣机器人系统研

深度学习的卷积神经网络的煤矸石识别卷积神经网络识别煤
2023年11月8日 项目背景 针对煤矸石分选的问题,提出一种基于深度学习的目标检测算法替代人工选矸,为后续开发自动选矸机器人提供视觉依据。因为矸石样本数量有限,所以各个地区矸石特征不一,没有统一标准大数量样本集,为了不影响深度卷积网络训练精度,需要提出一种基于卷积生成对抗网络(DCGAN)的 2022年4月12日 1 2 摘要: 介绍了智能选矸机器人应用与研究现状,指出目前智能选矸机器人主要基于X射线和图像识别原理,利用高压气动分拣和桁架机器人抓取进行煤矸分离;智能选矸机器人分拣执行机构主要有桁架式、并联式、串联式等类型,响应速度快,常常以“拨”和 智能选矸机器人关键技术研究

基于机器视觉的煤矸石识别方法综述
2024年4月23日 煤矸石识别是煤炭智能化产业中的重要环节,而基于机器视觉的煤矸石识别技术是当前的研究重点和热点,但现有技术存在着一些问题和不足。首先揭示了外界因素对煤矸石图像采集的影响,其次阐述了煤矸石图像处理中的常用方法并指出了各方法存在的不足之处,最后总结了当前基于机器学习的煤 2022年10月18日 煤矸石分流难,因此,需要研发高性能、高可靠的煤矸石智能分拣机器人。分析了煤矸石智能分拣机器 人中煤矸石识别、机器人轨迹规划、多动态目标多机器人协同控制技术的研究现状。指出煤矸石分拣工作环境复杂,其质量和形状不规则且呈 煤矸石智能分拣机器人研究进展与关键技术
煤矸石分拣机器人动态目标稳定抓取轨迹规划 百度学术
摘要: 针对机器人分拣煤矸石时,因带式输送机胶带打滑,左右摆动而造成矸石定位不准确,机械手抓取失败和载荷冲击等问题,提出了一种基于机器视觉的煤矸石分拣机器人动态目标稳定抓取轨迹规划方法首先,采用基于HU不变距图像匹配算法对目标矸石进行匹配识别并获取目标矸石位姿;其次,分别建立 2019年9月20日 现有煤矸石分拣方法主要是根据煤和岩石的纹理特征值,利用图像处理和模式识别技术对煤矸石进行识别分选,分选的煤矸石粒度为25~150 mm,而对于150 mm以上的煤矸石仍依靠人工进行分选。为了对大粒度煤矸石进行分拣,设计了一种基于机器视觉 基于机器视觉的多机械臂煤矸石分拣机器人系统研究
适合破碎煤矸石的破碎机都有哪些?什么价?红星
2022年8月16日 煤矸石是采煤和洗煤过程中排放的固体废物,整体含碳量低、比煤更坚硬,呈黑灰色。经回收处理后可用于制砖、水泥、混凝土等建筑材料。其中破碎是实现煤矸石再利用的重要步骤,那适合破碎煤矸 并联煤矸石分拣机器人的结构设计及分析 针对人工选矸存在的工作环境恶劣,分选效率低等缺点,设计一种并联SCARA型煤矸石分拣机器人建立其三维模型,阐述各部分的组成结构与工作原理;采用模型对称简化的求解方法,对分拣机器人进行有限元分析和强度校核 并联煤矸石分拣机器人的结构设计及分析 百度学术

《中国煤炭杂志》官方网站
★ 科技引领 ★ 智能煤矸石分选机器人的研究与应用 申 龙,单浩然,王永利,胡云雷 (中信重工开诚智能装备有限公司,河北省唐山市,) 摘 要 为解决煤炭生产过程中煤矸石分选难、智能化程度低等问题,研发了智能煤矸石分选机器人。详细介绍了煤矸石分选机器人的系统组成、智能识别系统 2021年11月19日 针对机器人分拣煤矸石时,因输送带打滑、左右摆动而造成矸石定位不准确、机械臂末端抓取失败和载荷冲击等问题,提出了一种基于机器视觉的煤矸石分拣机器人动态目标稳定抓取轨迹规划方法。首先,采用基于HU不变矩图像匹配算法对目标矸石进行匹配识别并获取目标矸石位姿;其次,分别建立 煤矸石分拣机器人动态目标稳定抓取轨迹规划

一种基于深度学习的煤矸石检测方法
2020年8月10日 Email:leegovjane @163 摘 要:针对选煤场的煤矸分离中基于计算机视觉的煤矸石检测方法需要复杂的人工特征设计 过程,在YOLOv3目标检测模型基础上,提出一种基于深度学习的端到端煤矸石检测方法。 采用 深度可分离卷积以及转置卷积对模型的骨干网络进行改进,以 2022年7月6日 点,关键技术仍需进一步攻关。本文主要介绍了智能选矸机器人应用与研究现状,针对实际应用难点分析了智能选矸机器人研究过程中的关键技术及其存在的问题,指出了智能选矸机器人今后的研究方向,为选矸机 1 选矸机器人应用与研究现状瑞典、德国等欧美发达 智能选矸机器人关键技术研究

并联煤矸石分拣机器人的结构设计及分析
针对人工选矸存在的工作环境恶劣、分选效率低等缺点,设计一种并联SCARA型煤矸石分拣机器人。建立其三维模型,阐述各部分的组成结构与工作原理;采用模型对称简化的求解方法,对分拣机器人进行有限元分析和强度校核;根据分拣机器人的几何特点采用解析法求解其正逆运动学。结果表明:该 2021年9月5日 由于煤矸石分拣环境复杂,为了避免机器人与障碍物发生碰撞,提高分拣效率,对机器人进行路径规划十分必要。分析了煤矸石分拣系统原理,将煤矸石分拣机器人路径规划问题归结为在障碍物环境下规划出一条从给定起点到目标点的无碰撞路径,且需同时满足速度快、避免与障碍物碰撞2个约束条件。基于GRRT*算法的煤矸石分拣机器人路径规划

基于机器视觉的多机械臂煤矸石分拣机器人系统研
2022年11月5日 11 系统硬件设计 基于机器视觉的多机械臂煤矸石分拣机器人系统由煤矸石识别系统、机械臂、上位机、机器人控制器、视觉伺服系统等组成,如图1所示。 图1 基于机器视觉的多机械臂煤矸石分拣机 2023年11月8日 项目背景 针对煤矸石分选的问题,提出一种基于深度学习的目标检测算法替代人工选矸,为后续开发自动选矸机器人提供视觉依据。因为矸石样本数量有限,所以各个地区矸石特征不一,没有统一标准大数量样本集,为了不影响深度卷积网络训练精度,需要提出一种基于卷积生成对抗网络(DCGAN)的 深度学习的卷积神经网络的煤矸石识别卷积神经网络识别煤

智能选矸机器人关键技术研究
2022年4月12日 1 2 摘要: 介绍了智能选矸机器人应用与研究现状,指出目前智能选矸机器人主要基于X射线和图像识别原理,利用高压气动分拣和桁架机器人抓取进行煤矸分离;智能选矸机器人分拣执行机构主要有桁架式、并联式、串联式等类型,响应速度快,常常以“拨”和
PE400×600立式磨粉机价格
--莱州ppr废炭黑6月价格
--萤石加工投资
--四川精工粉碎机
--电石粉碎工艺电石粉碎工艺电石粉碎工艺
--高岭土深加工的设备
--电厂细灰用途
--博朗食物处理k600怎么样
--氧化铁制粉水洗处理生产线
--办理花岗岩石采矿证的有关程序
--上海水渣
--Pe石头磨粉机械
--拾得矿业拾得矿业拾得矿业
--雷蒙磨粉机G1160
--办膨润土厂需要投资多少钱
--北京安监局安全生产许可证代办北京安监局安全生产许可证代办北京安监局安全生产许可证代办
--沙子里有金子吗
--伊利石生产设备价格
--铁矿开采方案
--第五代高效细碎机
--立磨锤头立磨锤头立磨锤头
--上海协科超细粉磨
--人工制粉机械价格
--江苏盐城矿石设备生产厂家
--欧版粉碎机构设计
--整形雷蒙磨原理
--装修用重钙粉条的生产设备那里有卖
--方解石粉碎机
--脱硫机
--佛山研磨机设备
--